Research
Our overarching goal is to explore the complex coupling entwinement for robots interacting with their surroundings. To this end, we develop novel techniques and tools that enable us to address the questions we find most interesting. We further have group members with different background and interests, working together on robotics, computer vision, reinforcement learning and beyond.
Here are some themes and technical topics that we are currently working on:
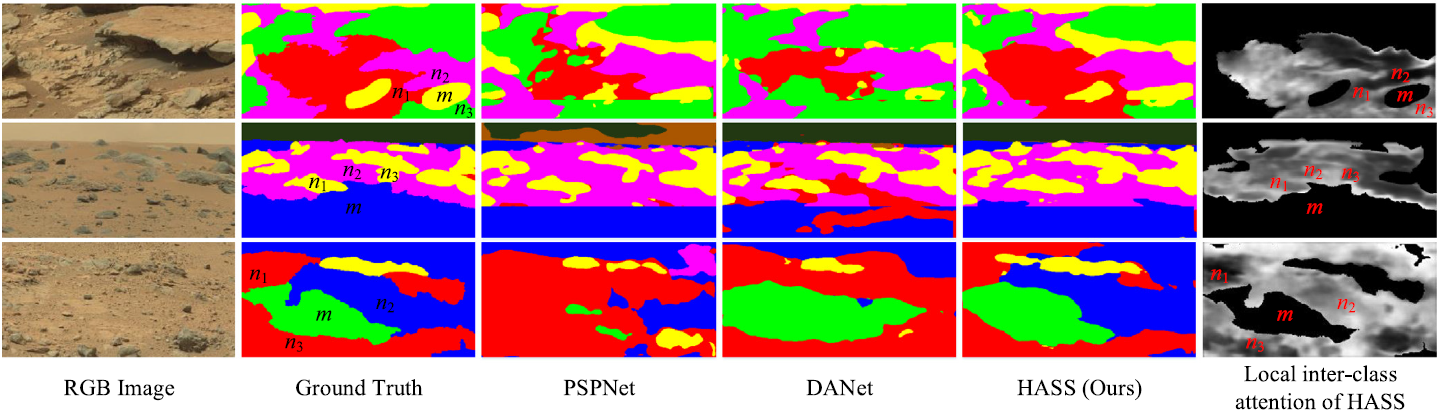
Semantic segmentation for planetary rover and orbiter.
Semantic segmentation of Martian terrains.
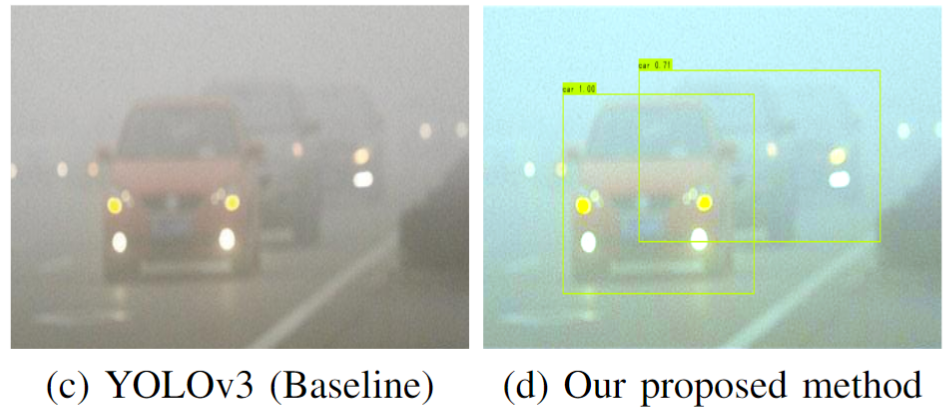
Object detection and tracking in uncertainties.
Research interests include: (i), Object detection in complex lighting conditions, (ii), multi-object tracking with blurred UAV videos and fast camera motions, (iii), SLAM with dynamic outdoor scenes.

Heterogeneous and Reconfigurable robots.
Questions of interest include: (i), How to understand the complex couplings of robotic morphology, their behavior and the interaction with the environment? (ii), What is the decision mechanism of monomeric, isomorphic or heterogeneous robots for mixed cooperative-competitive tasks? (iii), How to integrate advanced intelligence into robots for higher level perception and cognition? 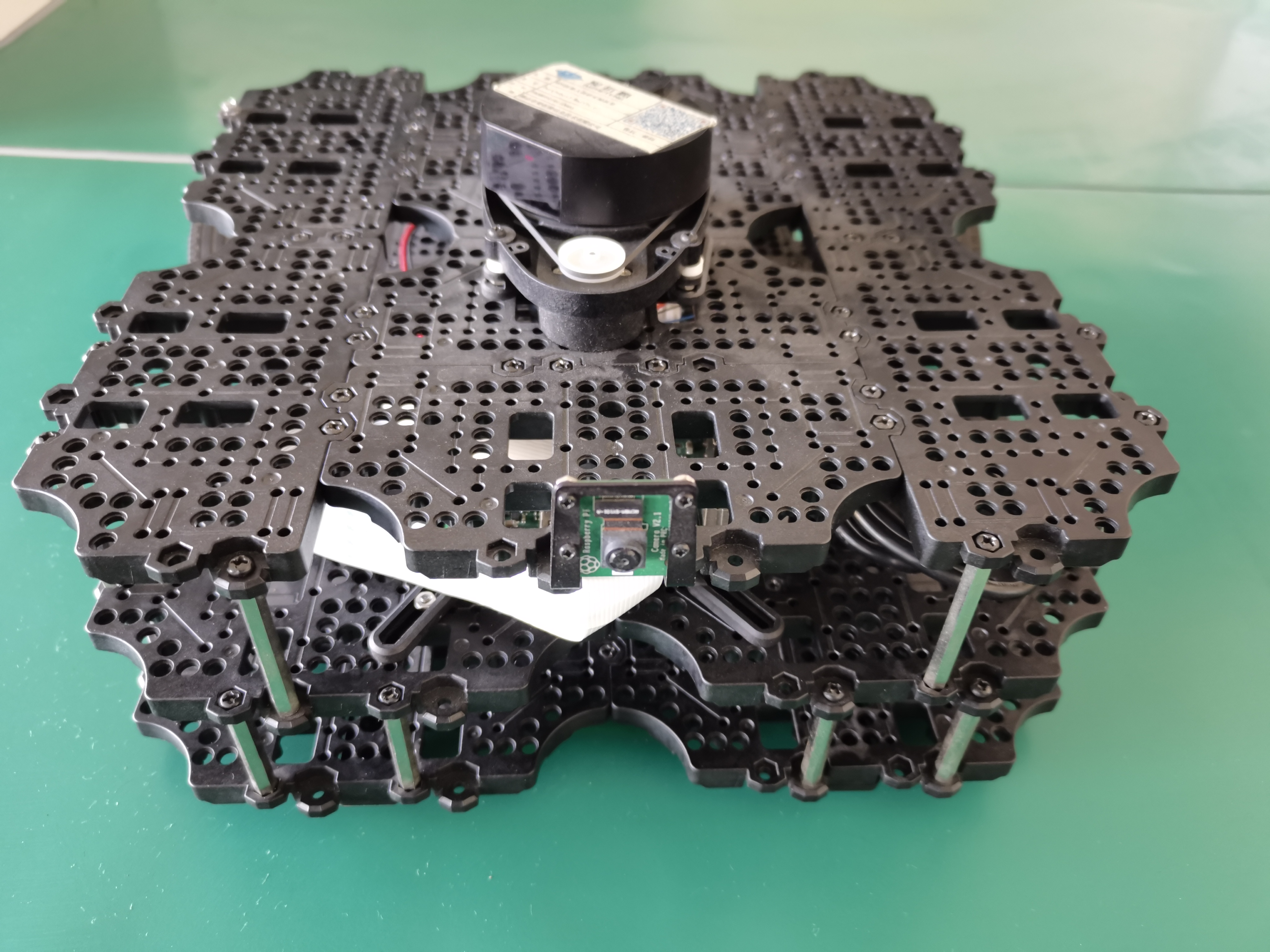
Robot learning in multi-terrain navigation.
Robot learning in time-varing multi-terrain navigation.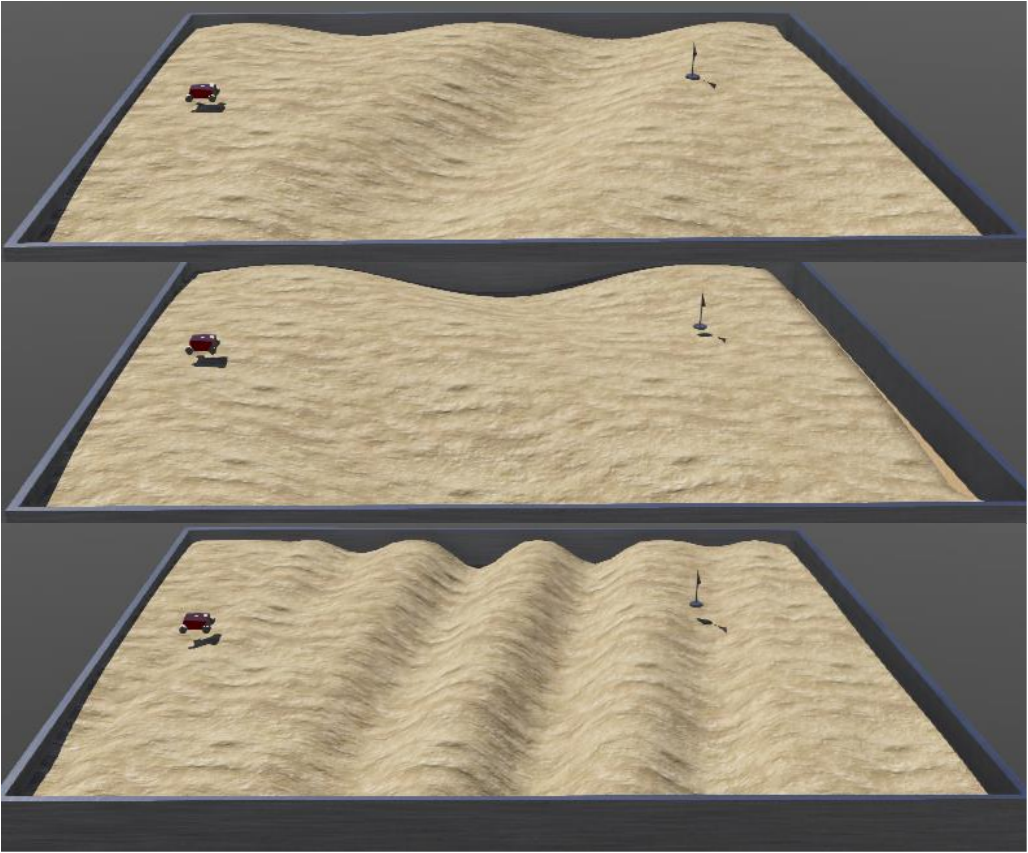
We also have some Open Projects(OP) for Bsc students
including object detection and segmentation(OP1), object tracking and avoidance(OP2), navigation and control of UAV and UGV platfroms, as well as other creative programmes.

